
Benutzer können Toyotas Roboter-Butler mit virtueller Realität trainieren und ihm im Voraus die (sogar komplizierten) Aufgaben zeigen, die er ausführen muss.
Vor fünf Jahren kündigte Toyota eine Zusage von 1 Milliarde US-Dollar an Forschungsinstitut (TRI) und hat Hunderte von Ingenieuren beauftragt, an Robotern und Produkten zu arbeiten, die auf künstlicher Intelligenz basieren, beispielsweise selbstfahrende Autos.
Diese Woche bot TRI Journalisten die Möglichkeit, an einem virtuellen Tag der offenen Tür teilzunehmen (Sie können sich einen Teil des Videos ansehen, das ich in der Post veröffentlicht habe), um den Stand der vom Labor durchgeführten Forschung zu erfahren.
Lieber, hast du einen neuen Kronleuchter gekauft oder freust du dich nur mich zu sehen?

Die meisten der auf der Veranstaltung gezeigten Prototypen sollen Menschen in ihren Häusern helfen. Die Idee eines Hilfsroboters gibt es schon seit Jahrzehnten, aber sie hat sich in der Realität nicht lange als plausibel erwiesen, insbesondere in Ländern wie Japan, in denen eine alternde Bevölkerung zu einem Mangel an Hilfspersonal führen könnte.
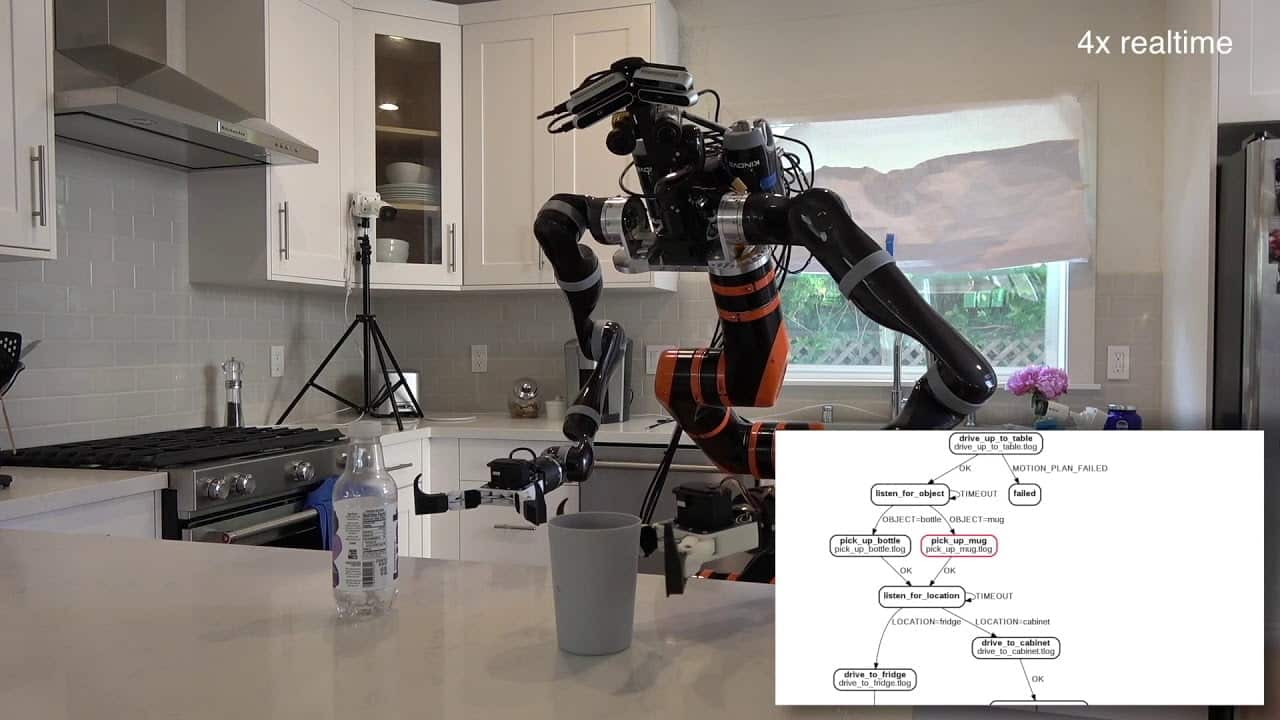
Toyotas Roboter Butler
Das Hauptdesign des TRI-Heimroboters ist so konstruiert, dass er an einem speziellen Satz Schienen hängt, die in die Decke eines Hauses eingebaut sind. Eine echte "Relevanz", die in einem begrenzten (und daher gut kontrollierten) Bereich arbeitet.
Ein bisschen anders als der Roboter-Butler, den wir uns vorgestellt haben, als wir mit seinem schönen Tablett in der Hand durch das Haus streiften, aber offensichtlich sah Toyota eine Reihe von Vorteilen. Eine davon ist die geringe Größe des Hauses.
Mit dieser Konfiguration benötigt der Roboter-Butler viel weniger Zeit, um das Layout des Hauses zu lernen. Er muss keine komplexen Wege um Hindernisse lernen, um von Ort zu Ort zu gelangen.
Der Roboter von TRI kann bei Nichtgebrauch bis zur Decke heruntergeklappt werden, sodass er praktisch keinen nutzbaren Platz beansprucht.
Eine privilegierte Ansicht
Einer der größten Vorteile dieser Lösung scheint jedoch die besondere Top-Down-Perspektive zu sein. Es gibt der Maschine einen besseren Standpunkt, um ihre Aktionen und die Position verschiedener Objekte, die sie möglicherweise manipulieren muss, zu beobachten.
Toyota verlässt sich stark auf die Vision eines Butler-Roboters, der aus einem begrenzten Satz von Parametern lernt. Wenn Sie möchten, dass der Roboter das Reinigen von Arbeitsplatten lernt, können Sie diese Aktion in einer Virtual-Reality-Umgebung ausführen. Der Roboter-Butler wird Ihre Aktionen verstehen und sie in der realen Welt nachahmen, wobei er natürlich die Variablen überwacht.
Es mag umständlich klingen, ist es aber nicht. Bedenken Sie, dass nach kurzer Zeit viele Aktionen anderen Robotern beigebracht und im Netzwerk geteilt werden, ähnlich wie bei den automatischen Rezepten bestimmter Lebensmittelroboter.
Wie wird der Roboter Butler hergestellt?
Zahlreiche Gelenke im Roboterarm ermöglichen eine Bewegung in alle Richtungen. Einige der Gelenke sind redundant, wodurch sie sich in praktisch jeder Position drehen und ausrichten können.
Es gibt nur noch ein Detail, das genau abgestimmt werden muss: Um einen solchen Roboter-Butler zu installieren, müsste das ganze Haus im Wesentlichen um die Maschine herum entworfen werden.
Idealerweise ist der Roboter ein zentraler Bestandteil der Planung des Hauses vor Baubeginn.
Daher würde ich sagen, dass das Konzept in Gebäuden mit mehreren Einheiten wie Altenpflegeeinrichtungen sinnvoller ist. Wenn die Bauherren die Einheiten im Inneren nahezu identisch aussehen lassen könnten, könnten die Ingenieure nur einen Roboter trainieren und die Informationen dann mit den übrigen Maschinen in den anderen Räumen teilen.
Weitere Details
Neben dem gesamten Heimbot zeigte TRI auch einige kleinere Aspekte dieser Technologie. Eine der wichtigsten ist die Klaue, mit der der Roboter-Butler Gegenstände nimmt. Ein Lichtsystem projiziert eine Reihe von Punkten in die „Hand“ des Roboters und eine Kamera, um zu beobachten, wie sich die Punkte der Extremität verformen, wenn sie ein Objekt aufnimmt.
Infolgedessen kann das System in Echtzeit die Eigenschaften des Objekts analysieren, mit dem es interagiert. Die Demo zeigte, dass er mehrere delikate Weingläser auf einer unbekannten Oberfläche übereinander gestapelt hatte.
Die Fortschritte von Toyota und TRI sind bemerkenswert, und im Zuge der Begeisterung planen sie, auch in Zukunft an dieser Art von Technologie zu arbeiten. Es gibt noch keine Pläne, es öffentlich zugänglich zu machen, aber das Unternehmen hofft, in naher Zukunft zumindest einige dieser Technologien einführen zu können.

