

Wenn es um Robotik geht, scheinen sich Ingenieure viel von der Natur inspirieren zu lassen. Wenn Sie sich unser Tag ansehen "Biomimetik„Sie finden die unterschiedlichsten Roboter mit mehr oder weniger Tiergestalt, oft nur Schlangen, während Sie Pipelines auf dem Meeresboden reparieren, Tunnel graben und vieles mehr.
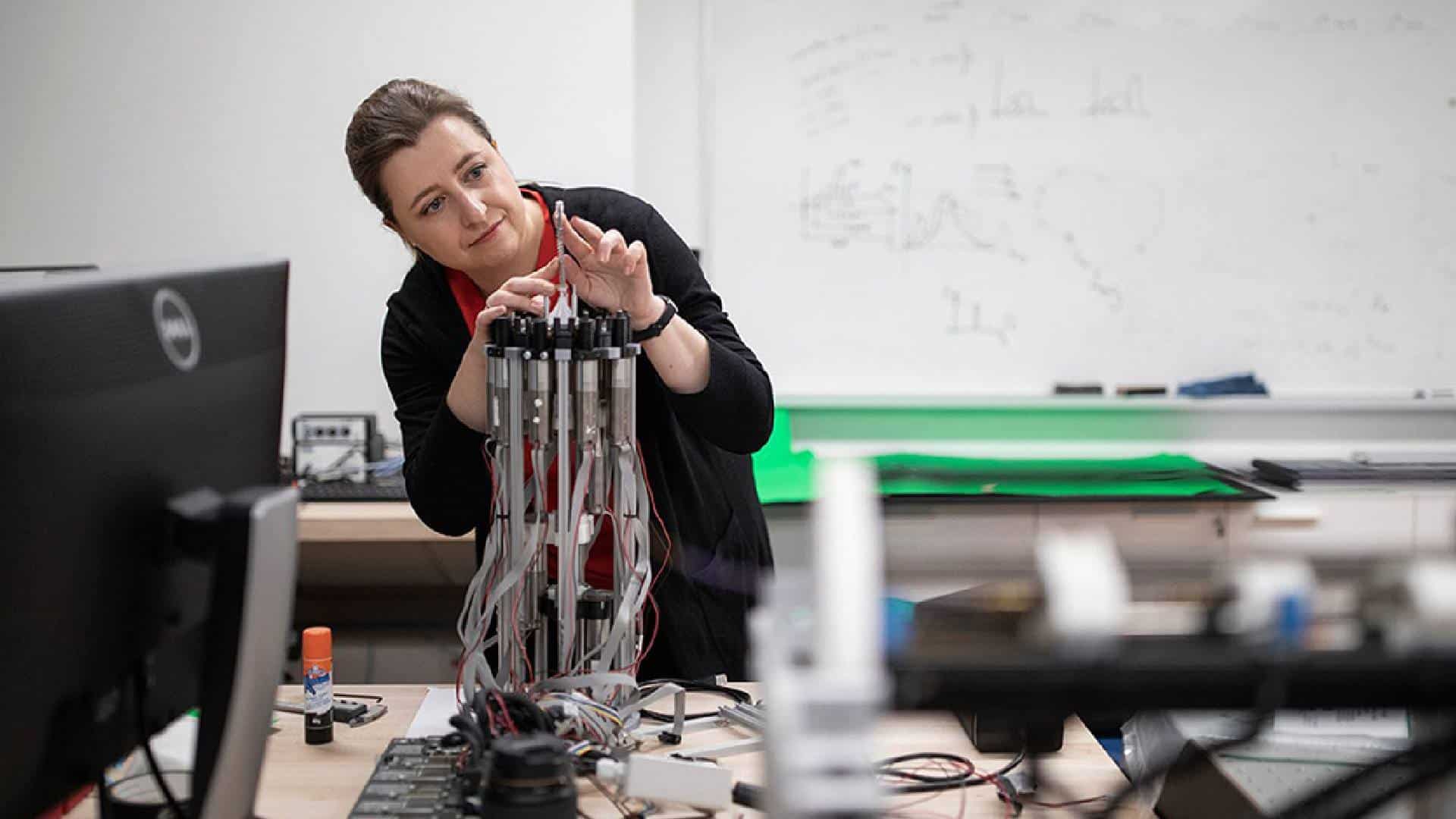
Jetzt ab eine Pressemitteilung des Continuum Robotics Lab an der University of Toronto News, dass ein Team unter der Leitung von Jessica Burgner-Kahrs baut sehr schlanke, flexible und erweiterbare Roboter, die von Ärzten eingesetzt werden könnten, um Leben zu retten und Zugang zu Punkten zu erhalten, die einem Chirurgen sonst unmöglich wären.
Roboterschlangen, um Leben zu retten
„Stellen Sie sich einen Neurochirurgen vor, dem ein Gehirntumor entfernt werden muss. Mit einem traditionellen und starren chirurgischen Instrument muss der Arzt die krebsartige Masse auf einem geraden Weg im Gehirn erreichen und dabei riskieren, in das lebenswichtige Gewebe einzudringen (und es zu beschädigen), heißt es in der Pressemitteilung.
Das Team experimentiert auch mit neuen, noch geschickteren und erweiterbaren Schlangenrobotern. Eines davon ist Origami-inspiriert, sehr leicht und bis zu 10-mal länger dehnbar als andere Modelle. Sie können sich nur weiter verbessern.
Burgner-Kahrs malt sich die Einsatzszenarien aus, in denen einer ihrer schlangenartigen Roboter, geführt von einem Chirurgen, eine kurvenreiche Strecke um das lebenswichtige Gewebe herumfahren und dennoch einen präzisen Operationspunkt erreichen kann. Ergebnis? Vormals „unmögliche“ Hirntumoren können plötzlich operierbar werden.
Es ist in der Tat keine Kleinigkeit: Diese „Schlangen“ könnten die gesamte Medizinbranche revolutionieren.
Drei Fragen an die Zukunft der Präzisionschirurgie
Die Idee, dass ausgeklügelte flexible Roboter Chirurgen helfen können (sogar halbautonom, daran arbeiten die Forscher bereits), ist absolut fantastisch.
Dafür stellt sich Burgner-Kahrs vier konkrete Fragen:
- Wie können wir Roboter steuern, um sie noch präziser durch beengte und verwinkelte Umgebungen zu bewegen?
- Können wir eine intuitivere Schnittstelle zwischen einem Menschen und einem Roboter entwerfen?
- Können wir vollständig autonome Schlangenroboter bauen?
- Wie können wir mehrere Roboter in Teams einsetzen, um eine kollaborative Aufgabe zu erledigen?
Von den Antworten wird die Zukunft abhängen.

