

Die Technologie hat uns neue Möglichkeiten zur Erkundung des Weltraums eröffnet, insbesondere mit Robotern, die sich als besonders effektive Werkzeuge zur Erkundung anderer Planeten erwiesen haben.
Sofern die Rückkehr zum Mond nicht unmittelbar bevorsteht, ist die Erforschung des Mars die nächste Errungenschaft der Menschheit im Weltraum. Spannendes Abenteuer, das Spuren von Ressourcen offenbaren könnte, bzw. von außerirdisches Leben Vergangenheit oder Gegenwart: Was wäre, wenn wir es mit einer Robotereidechse konfrontierten?
Auf allen Vieren auf dem Roten Planeten
Wissenschaftler der Nanjing Universität für Luft- und Raumfahrt Sie bauten einen vierbeinigen, von Eidechsen inspirierten Roboter, der für die Erforschung des Mars nützlich sein könnte.
Dieser Roboter, beschrieben in der Zeitschrift Biomimetik von MDPI (Ich werde die Studie hier verlinken), hat eine flexible Struktur, die die Bewegungen und den Gehstil von Wüsteneidechsen nachahmt.
In dem Papier, die Forscher Guangming-Chen, Lange Qiao, Zhenwen Zhou, Lutz Richter e Aihong Ji Sie schreiben, dass der Mars aufgrund seiner Geländezusammensetzung (bestehend aus körnigen Böden und Steinen unterschiedlicher Größe) für die heutigen schweren Rover unerschwinglich sein könnte. Für einen vierbeinigen Krabbelroboter, der sich an der Fortbewegung von Eidechsen orientiert, wäre das allerdings eine ganz andere Geschichte. Gesegnet ist sie Biomimetikimmer.
Wie wird die „Weltraumechse“ hergestellt?
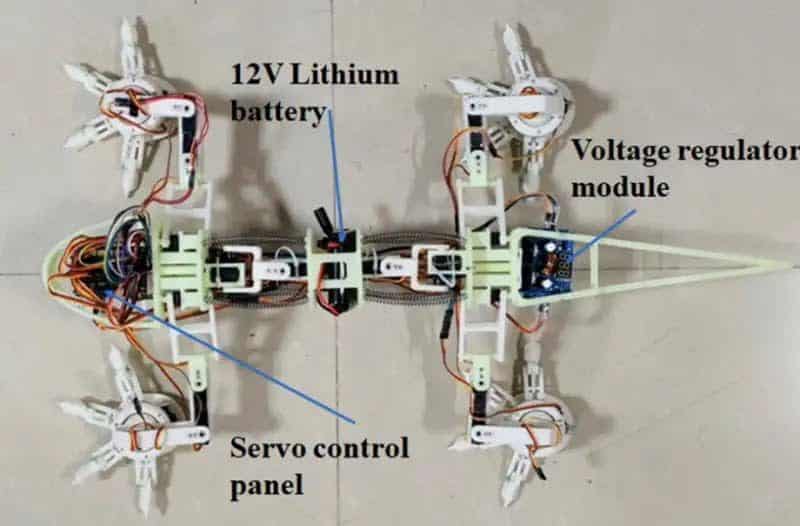
Der von Chen und seinem Team entwickelte biomimetische Roboter besteht aus einer flexiblen, wirbelsäulenähnlichen Struktur und vier Beinen. Um die „Krabbelbewegung“ der Eidechse nachzuahmen, verfügt jedes Bein über zwei Scharniere und ein Zahnrad, das eine Schwingung erzeugt.
Die Hüftgelenke, die die Wirbelsäulenstruktur mit den Beinen des Roboters verbinden, bestehen aus zwei Servomotoren und einem Vierpunktmechanismus, der es dem Roboter ermöglicht, aufzustehen und dabei das Gleichgewicht zu halten. Die „Beine“ des Roboters sind mit vier flexiblen „Fingern“ ausgestattet.
„Um die Bewegungen des Roboters zu bestimmen“, lesen wir, „werden kinematische Modelle der Füße, Beine und der Wirbelsäule sowie der Koordination zwischen Wirbelsäule und Beinen erstellt.“
Die nächsten Schritte
Zunächst haben die Forscher erst simuliert, dann beobachtet (mit einem Prototypen). 3D gedruckt) die Funktionsweise ihres Roboters, um zu sehen, ob er in der Lage ist, die Bewegungen der Eidechse nachzuahmen. Sogar auf Gelände, das die Härte des Mars „imitiert“. Die Ergebnisse? Sehr erfreulich: Bewegungen und Gangmuster wurden perfekt nachgebildet.
Ja, der Roboter kann sich effektiv in felsigen Umgebungen bewegen, er hat Potenzial für zukünftige Missionen zum Mars. Jetzt brauchen wir Verbesserungen: eine Schutzstruktur gegen Staub, stärkere Materialien, ausgefeiltere Algorithmen, ein kontinuierliches Stromversorgungssystem.
Der Rest ist bzw. wird Geschichte sein: Ich kann diese Eidechse bereits auf den Fernsehern auf der ganzen Welt „scharren“ sehen.

