
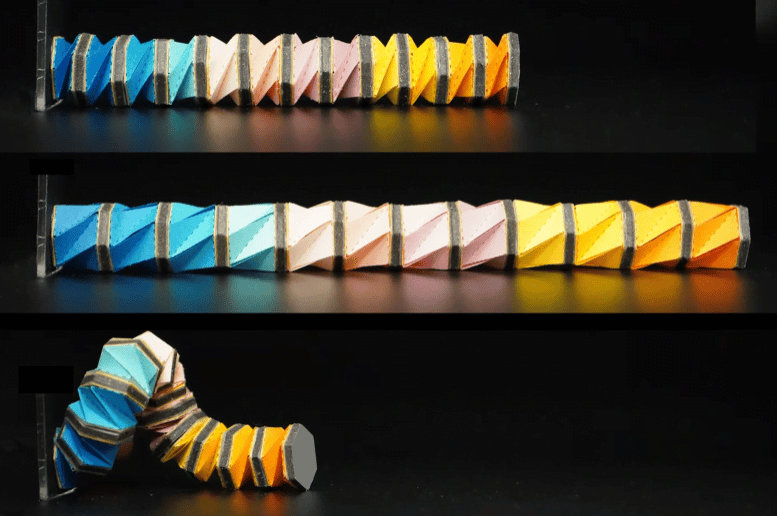
In seiner länglichen Form wirkt dieser Roboterarm wie eine Art Ziehharmonika, die sich für tausend Anwendungen effektiv ausdehnen und zusammenklappen kann.
Dieses Design, im Detail in einer neuen Studie beschrieben veröffentlicht in der Zeitschrift PNAS, ist vom Oktopus-Tentakel inspiriert und ahmt die Art und Weise nach, wie er sich dehnt, verdreht und Objekte manipuliert. Die Entwickler hoffen, dass es in biomedizinische Anwendungen integriert werden kann, um invasive Verfahren oder Operationen wie das Einführen eines Atemschlauchs durch den Mund oder das Anlegen eines Katheters zu unterstützen.
"Das Nervensystem des Oktopus befindet sich in seinen Tentakeln", sagt er Ruike Renée Zhao, Assistenzprofessor für Maschinenbau an der Stanford University und Autor des neuen Artikels.
Was wir hier tun, ist sein hochintelligentes Armsystem nachzuahmen. Da die Tentakel eines Oktopus so vielseitig sind, können sie Hunderte, Tausende von verschiedenen Bewegungen ausführen, um mit Objekten zu interagieren.
Ruike Renée ZhaoStanford Universität
So entsteht der neue, vom Oktopus inspirierte Roboterarm
Der neue Roboterarm verdankt seine Flexibilität einigen Schlüsselfunktionen, darunter Bewegungen, die von einem Magnetfeld statt von Motoren angetrieben werden, von Origami inspirierte Panels und ein weiches Exoskelett.
Der "Origami"-Krake
Eine Reihe winziger Segmente bildet einen einzigen Arm davon weicher Roboter. In jedem Segment befinden sich zwei sechseckige Platten aus weichem Silikon mit magnetischen Partikeln in geneigten Kunststoffplatten mit Origami-Muster Kresling, ein Origami-Stil, der sich verdreht, um sich zu dehnen und zusammenzuziehen. Die Form der Paneele ermöglicht es dem Arm, sich in eine Röhre zu erstrecken oder in seine komprimierte Konfiguration zu schrumpfen, genau wie Oktopus-Tentakel.
Aufgrund der magnetisierten Platten im gesamten Arm kann der Roboter-Oktopus mit einem starken Magnetfeld ferngesteuert werden, ähnlich wie in einem MRT-Scanner. Während der Testphasen verwendeten die Forscher elektromagnetische Spulen, um ein dreidimensionales Magnetfeld um den Arm herum zu erzeugen. Durch die Ausrichtung des Magnetfeldes um den Arm kann ich die Bewegung und Verformung der einzelnen Origami-Einheiten steuern. Das Design ermöglichte es den Forschern auch, jedes Armsegment unabhängig zu steuern, um die Bewegungen fein abzustimmen.
Durch die Steuerung des externen Magnetfelds können wir Dehnung, Biegung und andere Kombinationen steuern. Wir könnten den genauen Punkt überprüfen, von dem aus sich der Oktopus-Roboter zu biegen beginnt.
Ruike Renée ZhaoStanford Universität
Außergewöhnliche Vielseitigkeit
Es ist möglich, alles im Arm anzupassen, von der Magnetisierungskraft über die Abmessungen bis hin zu den Materialien, aus denen er besteht, bis hin zu der Anzahl der Einheiten, aus denen er besteht.
Die Fähigkeit, einen Roboter zu bekommen, der sich ohne Motoren bewegen kann, ist ein absolut unglaublicher Faktor. Damit können Sie die Größe des gesamten Robotersystems "Oktopus" wirklich auf ein Minimum reduzieren und die Einsatzmöglichkeiten drastisch erhöhen.

